

CL-CobotMon
an
artificial vision system for the monitoring collaborative robotics
applications
Description
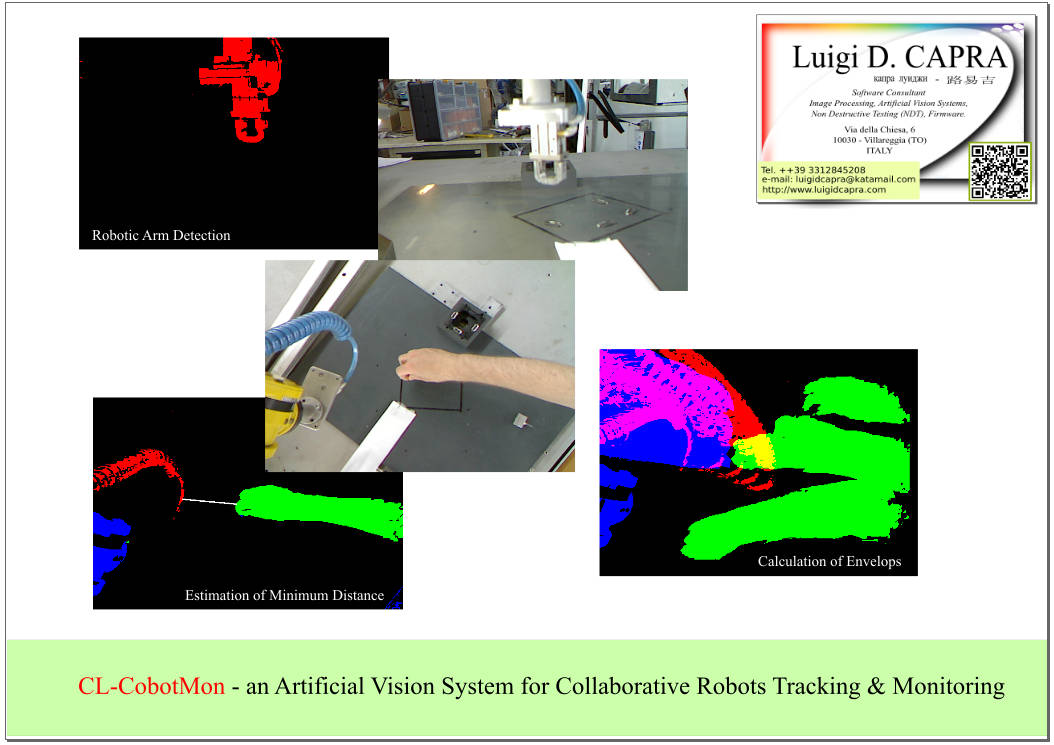
CL-CobotMon is an Artificial Vision program specifically dedicated to monitoring and control of collaborative robotic applications.Based on the CL-Eidos Artificial Vision System and the CL-Eidos 4.0 Network Vision Architecture, the CL-CobotMon application has been specifically designed for monitoring and controlling collaborative robotic systems.
After configuration, the CL-CobotMon program is able to perform an analysis of the scene portrayed identifying the constituent elements of the robotic arm and the eventual presence of the hand of the operator. In the event that both of these elements are present, the CL-CobotMon program automatically determines the closest proximity between the human hand and the robotic arm and provides an estimate of the distance in relative units. The CL-CobotMon program is also able to calculate in real time the envelopes corresponding to the areas affected by the movement of the robot arm and the operator's hand, which will enable to determine the geometry of the interaction and / or interference areas between the co-workers and are the starting point for the development of models for predicting trajectories of operator gestures.