
CL-CobotMon
un sistema di visione artificiale per il monitoraggio di applicazioni di robotica collaborativa
Descrizione
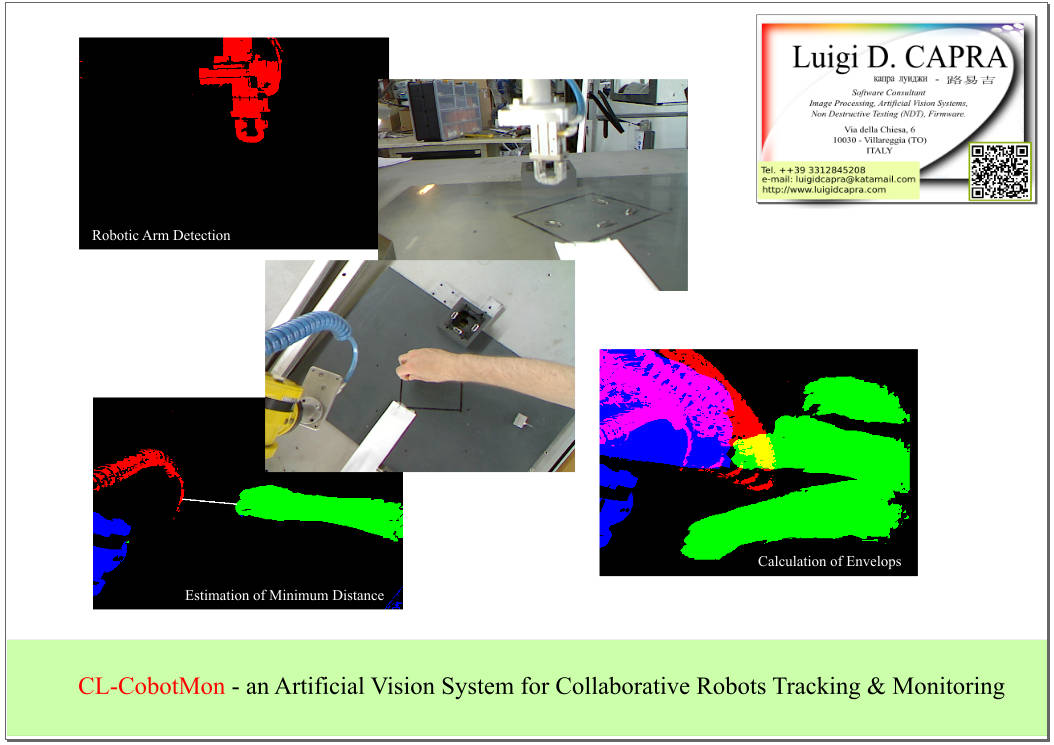
CL-CobotMon è un programma di Visione Artificiale espressamente dedicato al monitoraggio e al controllo di applicazioni di robotica collaborativa.Basata sul sistema di visione artificiale CL-Eidos e sull'architettura di visione distribuita in rete CL-Eidos 4.0 l'applicazione CL-CobotMon è stata espressamente progettata per il monitoraggio e il controllo di applicazioni di robotica collaborativa.
Previa configurazione, il programma CL-CobotMon è in grado di effettuare un'analisi della scena ritratta nelle immagini acquisite individuando gli elementi costitutivi del braccio robotico e l'eventuale presenza della mano dell'operatore. Nel caso in cui entrambi i suddetti elementi siano presenti il programma CL-CobotMon determina automaticamente il punto di massima vicinanza fra la mano umana e il braccio robotico e fornisce una stima della distanza in unità relative. Il programma CL-CobotMon è inoltre in grado di calcolare in tempo reale gli inviluppi corrispondenti alla aree interessate dal movimento del braccio robotico e della mano dell'operatore, che consentono a loro volta di determinare la geometria delle aree di interazione e/o interferenza fra i co-worker e costituiscono il punto di partenza per lo sviluppo di modelli per la previsione delle traiettorie dei gesti dell'operatore.